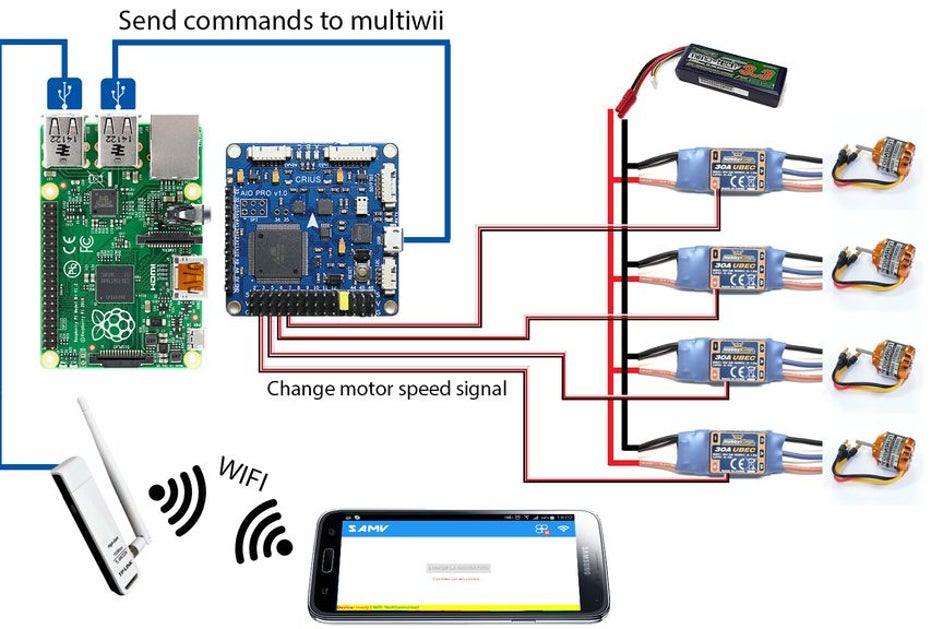
Este quadcopter tiene una particularidad porque está usando 2 controladores diferentes y podría ser piloto con 2 dispositivos diferentes: un control remoto o un teléfono inteligente.
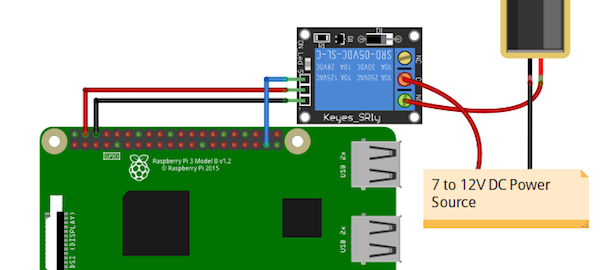
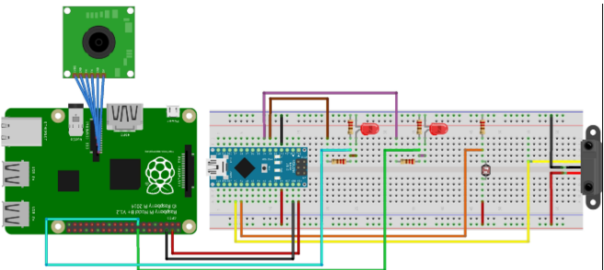
El controlador Multiwii cuida los 4 motores y distribuye la energía para suministrarlos, mientras que el Raspberry Pi recopila la información que proviene del teléfono inteligente y los transmite al Multiwii. ¡También puedes tomar fotos y videos Full HD también! Una cámara Pi se coloca en el frente del Drone Pi. Puede grabar o simplemente tomar una foto a una llave USB.
Para construir nuestro quadcopter necesitará las siguientes partes:
- Raspberry pi
- Un marco : puede comprarlo en Internet o puede hacerlo como nosotros.
- 4 motores Para un quadcopter necesitas 4 motores pero si quieres hacer un octocopter necesitarás 8 motores también.
- 4 ESC el controlador de velocidad electrónico se utiliza para entregar la potencia al motor con la información de Multiwii
- Batería por supuesto, si quieres volar, debes suministrar tus motores para que necesites una batería.
- Monitor de batería : suena cuando la batería está baja.
- Tablero de distribución de energía: esta placa se utiliza para conectar sus ESC a la batería.
- Conectores de 3,5 mm – Para soldar el esc y los motores
- Conectores de 4,5 mm : para quitar el viejo conector de la placa de distribución y soldar este nuevo.
- Hélices : un quadcopter con algunos motores, pero sin hélices no es un quadcopter, así que elige tus accesorios de acuerdo con tu marco.
- Multiwii : este controlador se utiliza para controlar los motores y compartir la potencia.
- Almohadilla de montaje Debido a que los motores crean vibración, debe comprar alguna almohadilla de montaje para reducirlos debajo de la unidad multiwii
- Cámara Pi– Para capturar video y tomar fotos. Solo se puede ejecutar con una Raspberry pi
- Llave Wifi se conecta al Raspi y crea una red wifi para transmitir la información de la aplicación del teléfono inteligente al Raspi
- Llave USB : para guardar el video
- Control remoto + receptor rc: si desea controlar su dron con esto. Conectará el receptor rc a Multiwii.
Debe soldar los conectores al cable ESC, al cable del motor y al cable de la placa de distribución.
¿Cómo funciona?
El multiwii
Multiwii es un proyecto francés de código abierto basado en un arduino. El proyecto es de código abierto, por lo que podemos encontrar muchos tipos de multiwii. Utilizamos una versión similar de CRIUS AIO PRO V2. Este es un controlador de vuelo: su función es enviar señales de velocidad a la esc para mantener el quadcopter en el aire. Usamos el proyecto mutlwii porque es un proyecto conocido utilizado por muchos usuarios con una gran comunidad pero principalmente porque programas como este son demasiado complicados para nosotros.
La frambuesa
En nuestro proyecto, la frambuesa hizo el papel principal. Primero, al inicio, crea una red wifi privada con un servidor DHCP (para dar una dirección IP), esta red wifi no tiene acceso a Internet y esto solo para comunicarse con el teléfono inteligente. En segundo lugar, muestra un programa de Python (creado por nosotros) que inicia un websocket. Un websocket es una conexión permanente entre el servidor (frambuesa) y el cliente (la aplicación de teléfono inteligente), servirá al comando recibido de la aplicación. Luego, el mismo programa se conecta a la multiwii a través de USB. Servirá para enviar información de comandos que provienen del teléfono inteligente a la multiwii (vea el esquema para comprender).
La aplicación
La aplicación se realiza en html / css / javascript con cordova. Cordova es una tecnología que permite crear una aplicación con tecnología web compatible con Android, iOS y más … El usuario piensa que es una aplicación estándar de Android, pero en realidad es una vista web :), es fácil desarrollar aplicaciones como esta para desarrolladores web …
El marco
Para hacer un buen marco necesita usar los elementos más ligeros que pueda. Para nuestro Drone Pi, tuvimos que construirlo con elementos de reciclaje para que nuestro marco sea un poco pesado, pero de todos modos no importa para nuestros motores.
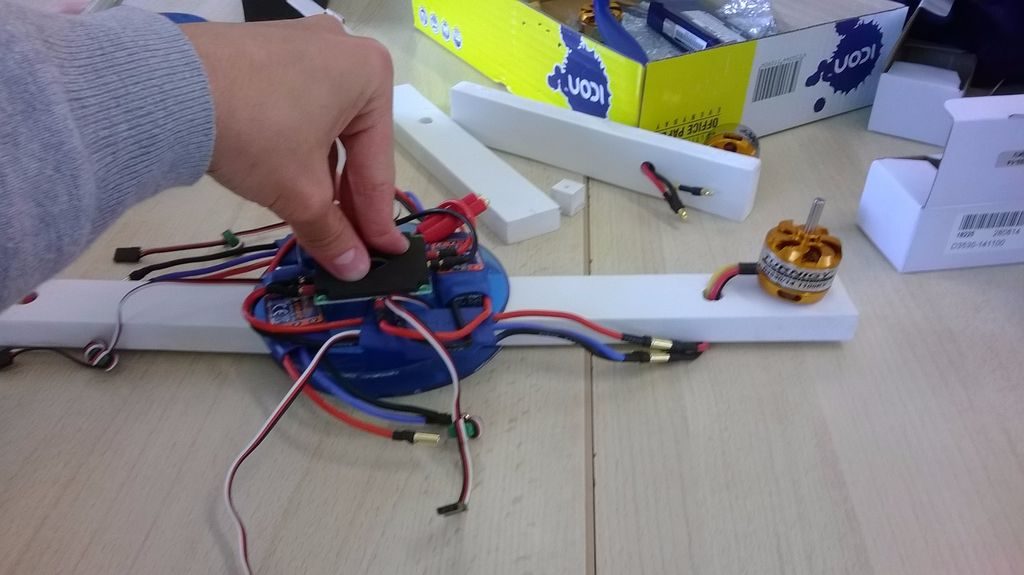
El diámetro del marco es de 0,45 m porque queríamos un «quadcopter estable» para la cámara y no un «quadcopter de carreras». En el centro de la X hay 3 niveles (tal vez 4 en el futuro) para colocar los controladores, los ESC y nuestra batería (tiene todas las citas en las imágenes en la parte superior de la página).
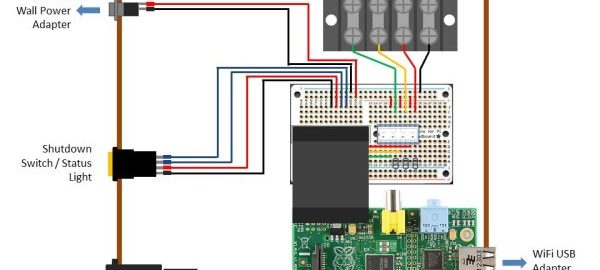
Hemos creado una plataforma para el multiwii en la parte superior del quadcopter y otra para la batería en la parte inferior del quadcopter. Para la plataforma Multiwii, queríamos poner la frambuesa debajo de la multiwii porque hay algunas conexiones entre ellas. Para la plataforma de la batería, queríamos cargar o quitar la batería para cargarla. Todas las imágenes están en el siguiente paso …
Finalmente, colocamos 4 pies en el quadcopter para poder aterrizar, pero no son bonitos ni malos.
Propulsión
Para la propulsión necesitas tus 4 motores, tus 4 ESC (para adaptar el voltaje a los motores), tu batería y finalmente tu Multiwii.
- Conecte sus motores a sus ESC. Puede invertir el cable para invertir la rotación de sus hélices (vea el esquema para conocer la dirección de rotación). Para comenzar, NO coloque sus accesorios en los motores para no tener ningún accidente, los accesorios son frágiles y podrían romperse. .
- Conecte el ESC a la placa de distribución (respete el color).
- Si todo está bien, puede instalar los componentes en el marco
- El tornillo que teníamos con el motor era demasiado grande para las hélices, por lo que necesitábamos agrandarlos





Controlador de vuelo y frambuesa
Ahora instalaremos el multiwii y el raspberry pi. Para instalar los dos componentes en el mismo lugar, creamos un soporte que vino en la parte superior de la frambuesa para colocar el multiwii (ver imagen).
- Instala la frambuesa con su apoyo
- Coloque el multwii en el soporte con almohadilla antivibración
- Conecta los ESC a la multiwii con los pines dedicados
A continuación compilaremos el firmware multiwii en la placa. Para comenzar, conecte la placa multiwii a su computadora a través de USB
Para configurar el multiwii:
- Descargue el firmware multiwii de https://code.google.com/p/multiwii/
- Descargue el software arduino de https://www.arduino.cc/en/Main/Software
- Proyecto arduino abierto «Multiwii.ino»
- Cambie la placa arduino en «Herramientas»> «Placa»> «Arduino Mega 2560 o Mega ADK»
- Seleccione el puerto en «Herramientas»> «Puerto serie»> Y seleccione el puerto multiwii.
- A continuación, abra el archivo «config.h»
- Busque al principio del archivo la línea: «// # defina QUADX» y descomente (elimine el «//»)
- Busque nuevamente la línea «// # define CRIUS_AIO_PRO» y descomente.
- Todo está listo, guarda el archivo y ejecuta la compilación
- A continuación, deberá calibrar todos los sensores con MultiwiiConf, le dejo buscar tutoriales en Internet.
En este momento, no conectamos el Multiwii al Raspi, por lo que si desea ver sus motores en acción antes de configurar su Raspberry Pi, colóquelos en su marco, necesitará un control remoto con un receptor rc y conectar el rc receptor a la Multiwii. No le explicaremos cómo hacerlo, pero Google es su amigo;) y no es difícil hacerlo. ( NO use el motor con sus hélices )
Raspberry Pi
Instalación de Debian:
Instale raspbian con noobs siguiendo este tutorial: www.raspberrypi.org/help/noobs-setup/
Inicie raspi-config y habilite pi-camera
Configuración de IP
sudo nano / etc / network / interfaces elimine toda la configuración de wlan0 y edite esto:
allow-hotplug wlan0
iface wlan0 inet static
dirección 192.168.10.1
máscara de red 255.255.255.0
Gateway 192.168.10.1Instalación de Hostapd:
Antes de comenzar, realice todas las actualizaciones:
sudo apt-get update && sudo apt-get upgradeInstalar hostapd:
sudo apt-get install hostapdY prueba con una configuración mínima
sudo hostapd hostapd.confSi puede ver su red desde su teléfono inteligente, funciona PERO NO INTENTE CONECTARSE (fallará con un error de IP porque no tenemos ningún servidor DHCP)
Instalación del servidor DHCP:
Ahora necesitamos instalar un servidor DHCP para dar la dirección IP a los clientes wifi.
sudo apt-get install isc-dhcp-serverEjecute este comando para editar el archivo:
sudo nano /etc/dhcp/dhcpd.confEncuentra las líneas que dicen
opción nombre-dominio "ejemplo.org";
opción de servidores de nombres de dominio ns1.example.org, ns2.example.org;y agregue «#» antes de ellos para comentarlos
Instalar usbmount
Necesitamos usbmount para montar la llave USB. Esto es para guardar el video en la llave USB.
sudo apt-get install usbmountAhora todas las claves usb deben estar montadas en la carpeta «/ media /»
Instale el programa Python quadcopter:
Primeras dependencias de instalación:
sudo apt-get install python-pip build-essential python-dev
sudo pip install tornadoy clonar el proyecto git
git clone https://github.com/reglisse44/Multiwii-raspberry-drone-server.git multiwiiControllPuede probar el programa iniciando así:
Prueba esto !!:
Advertencia: por el momento, si desea iniciar el programa Python, necesita:
- La cámara pi conectada y activada en raspi-config
- La placa multiwii conectada a un puerto USB de frambuesa como el nombre «ttyUSB0» (puede verificar con el comando «dmesg | grep tty», si su multiwii está conectado con otro nombre cámbielo al comienzo del archivo «main.py»). «)
Antes de comenzar, reinicie su pi para aplicar toda la instalación anterior.
A continuación, siga estos comandos:
sudo hostapd -B /etc/hostapd/hostapd.conf
sudo ifconfig wlan0 192.168.10.1
servicio sudo reinicio del servidor isc-dhcp
sudo python multiwiiControll / main.pyExplicación:
- «-B» es lanzar hostapd en segundo plano
- Después de iniciar hostapd, el cambio de ip (no sé por qué). Entonces necesitamos configurarlo manualmente
- Reinicie el servidor dhcp para iniciarlo con la nueva red wlan0
- Y comienza el script de Python
Automatizaciones esto en el arranque:
Para iniciar todos estos comandos en el arranque, utilizamos cronjob y un script sh.
sudo crontab -eEste comando abre el editor nano. Escriba esto al final del archivo:
@reboot /home/pi/multiwiiControll/autostart.sh
@reboot sudo python /home/pi/multiwiiControll/main.py &Salga y reinicie, si todo está bien, ¡todo debe comenzar en el arranque!
-
 Infrarojo seguidor de linea¡Oferta!
Infrarojo seguidor de linea¡Oferta!$3.50$1.75 -
 Kit Raspberry – Sensor de lluvia FR-04¡Oferta!
Kit Raspberry – Sensor de lluvia FR-04¡Oferta!$97.00$92.50 -
 Case para Raspberry Pi 3¡Oferta!
Case para Raspberry Pi 3¡Oferta!$10.00$6.99