El sistema responde cuando un objeto es detectado a menos de 10cm de distancia del sensor ultrasónico, cuando está dentro del rango abre las puertas accionadas por los servomotores, si el objeto se mueve mayor a 10cm entonces comienza una cuenta de aproximadamente 3 segundos y se cierran las puertas.
COMPONENTES
- 1 Arduino UNO
- 2 Servomotores Futaba S3003
- 1 Sensor Ultrasónico HC-SR04
- 2 Leds, uno de color rojo y otro verde
- 2 Resistencias de 330ohms
- 1 Protoboard
También necesitas el IDE de Arduino https://www.arduino.cc/en/Main/Software
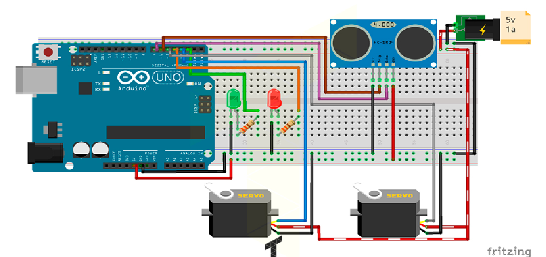
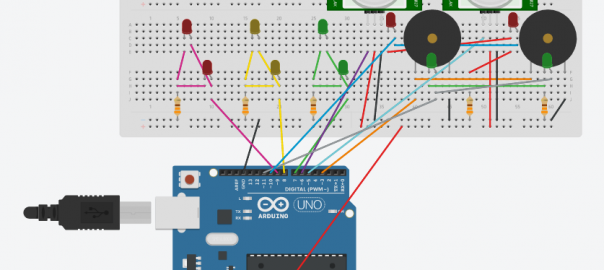
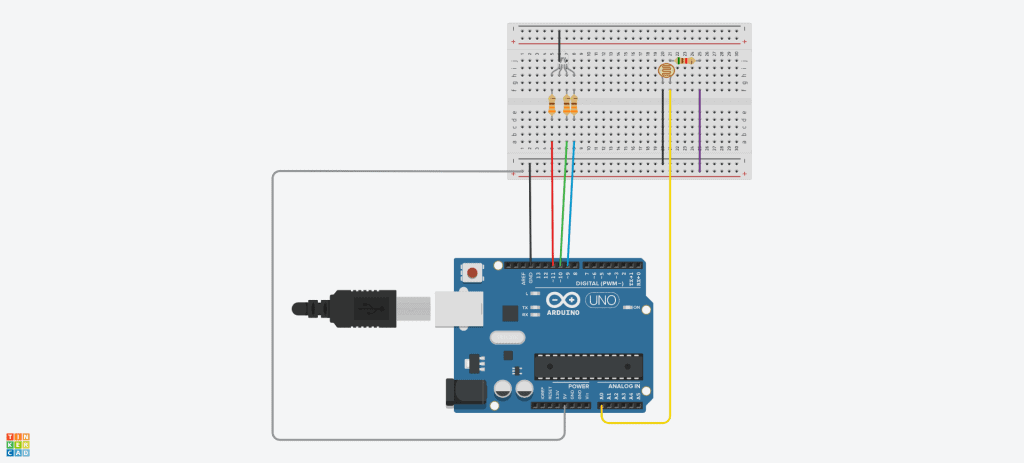
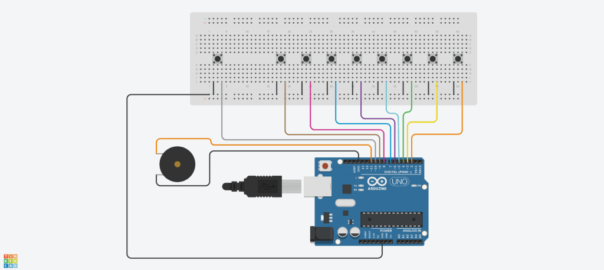
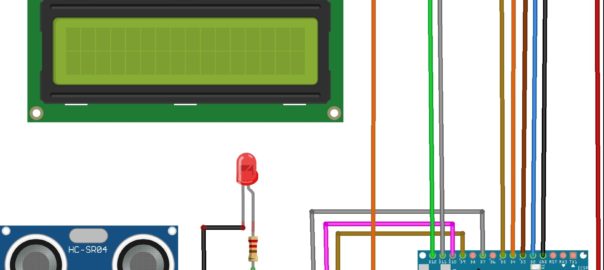
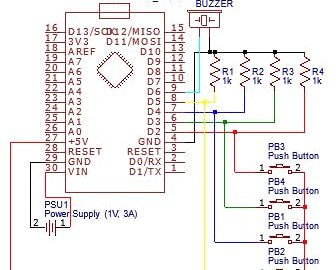
DIAGRAMA
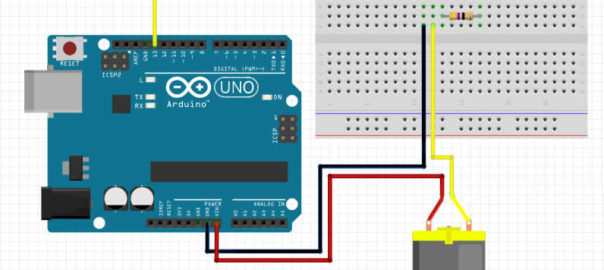
El pin 2 va a un extremo de una resistencia de 330 ohms, el otro extremo de la resistencia se conecta a la parte positiva (ánodo) del led verde, repite esto para conectar el pin 4 con el led rojo. Los pines 3 y 5 se conectan a las señales de los servomotores. Por último, tenemos el sensor ultrasónico, la señal Trig se conecta al pin 6 y la señal Echo se conecta al pin 7. Dado que estamos usando motores debemos utilizar una fuente externa, de 5volts y un Amper como mínimo, también tendrás que poner en común la tierra del sistema con la de la fuente.
CÓDIGO
El código viene muy bien comentado, pero dejaremos algunos puntos que no debes olvidar.
-Instalar todas las librerías mencionadas en el proyecto, previo a esto dejamos los enlaces.
-Los servomotores se mueven inicialmente a 90 grados, cada uno en distinta dirección, si tienes problemas con su dirección verifica que estén en el lado correcto.
-Si deseas modificar la distancia con la que se accionan las puertas, debes modificar el parámetro dentro de sentencia condicional if (distanceT < 10 && flagT == false) .
-La función uint8_t summary() retorna un promedio de la distancia obtenida, su función es solo estabilizar el valor, puede o no ser utilizada en el programa.
Teniendo claro los principales puntos, aquí el código.
#include<Ultrasonic.h> //https://github.com/JRodrigoTech/Ultrasonic-HC-SR04
#include<Servo.h> //https://github.com/arduino-libraries/Servo
//The TRIG and ECHO pins of the ultrasonic are defined and
//servoRightT & servoLeftT objects are created to control the servos
Ultrasonic ultrasonicT(6, 7);
Servo servoRightT;
Servo servoLeftT;
//Assigning the pins to the LEDs
const uint8_t ledOpenT = 2;
const uint8_t ledClosedT = 4;
//Variables to store positions of the servos, the distance of the ultrasonic, a flag that
//allows to rectify the change of distance and starts a variable of minimum seconds to two
int16_t posRightT, posLeftT, distanceT, initialDistanceT, continuousSecondsT = 0;
bool flagT = false;
const uint8_t minimalSecondsT = 2;
//loopTimeT and waitingDoorClosingT define the time (in milliseconds) that the events of
//your function will last, timeElapsedT and timeElapsedDoorClosingT are variables
//that will store the elapsed time
const uint8_t loopTimeT = 200;
unsigned long timeElapsedT = 0;
const uint16_t waitingDoorClosingT = 1000;
unsigned long timeElapsedDoorClosingT = 0;
void setup() {
//The pins of the servos are defined
servoLeftT.attach(3);
servoRightT.attach(5);
//The servos, initially, will move 90 degrees
servoLeftT.write(90);
servoRightT.write(90);
pinMode(ledOpenT, OUTPUT);
pinMode(ledClosedT, OUTPUT);
digitalWrite(ledClosedT, HIGH);
//The variables invoke the millis() action
timeElapsedT = millis();
timeElapsedDoorClosingT = millis();
}
void loop() {
//A variable that calls the millis() function is created, then the function overflow is managed
unsigned long currentMillisLoopT = millis();
if ((unsigned long)(currentMillisLoopT - timeElapsedT) >= loopTimeT) {
//The distance is obtained in real time and stored in distanceT to be compared with
//the return value sumary(), if both distances are equal and the flag is true then
//the door is opened, otherwise, call the function beforeCloseDoor()
distanceT = ultrasonicT.Ranging(CM);
if (distanceT == summary()) {
if (distanceT < 10 && flagT == false)
openDoor();
else if (distanceT >= 10 && flagT == true)
beforeCloseDoor();
}
timeElapsedT = millis();
}
}
//This function returns the average of 4 readings of the distance, its purpose is to have
//a more accurate data of the measurement
uint8_t summary() {
uint8_t sumT = 0;
for (uint8_t iT = 0; iT < 3; iT ++) {
sumT = sumT + (distanceT = ultrasonicT.Ranging(CM));
delay(50);
}
initialDistanceT = sumT / 3;
return (initialDistanceT);
}
//openDoor() generates 2 events, one is in the servomotors to change its position
//(both in opposite way) and another event changes the state of the LEDs
void openDoor() {
flagT = true;
posLeftT = 90;
for (posRightT = 90; posRightT >= 0; posRightT -= 1) {
if (posLeftT <= 180) {
posLeftT++;
servoLeftT.write(posLeftT);
}
servoRightT.write(posRightT);
delay(15);
}
digitalWrite(ledOpenT, HIGH);
digitalWrite(ledClosedT, LOW);
}
//A timeout of +-3 seconds is granted and calls the closeDoor() function
//You can modify the wait time in the variable minimalSecondsT
void beforeCloseDoor() {
unsigned long currentMillisDoorT = millis();
if ((unsigned long)(currentMillisDoorT - timeElapsedDoorClosingT) >= waitingDoorClosingT ) {
continuousSecondsT++;
if (continuousSecondsT == minimalSecondsT)
closeDoor();
timeElapsedDoorClosingT = millis();
}
}
//This works in a manner contrary to the openDoor() function
void closeDoor() {
flagT = false;
posLeftT = 180;
for (posRightT = 0; posRightT <= 90; posRightT += 1) {
if (posLeftT >= 90) {
posLeftT--;
servoLeftT.write(posLeftT);
}
servoRightT.write(posRightT);
delay(15);
}
continuousSecondsT = 0;
digitalWrite(ledClosedT, HIGH);
digitalWrite(ledOpenT, LOW);
}-
 Arduino ATmega 2560 R3¡Oferta!
Arduino ATmega 2560 R3¡Oferta!$20.50$19.00 -
 Arduino Uno Wifi¡Oferta!
Arduino Uno Wifi¡Oferta!$15.00$13.00 -
 Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!
Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!$10.00$9.50
Superb, what a webpage it is! This web site provides helpful facts to us,
keep it up.