El kit para armar robot seguidor de línea para Arduino + Código es uno de los proyectos más populares entre estudiantes y aficionados a la robótica. Su misión es seguir una línea negra marcada en un fondo blanco. Con la ayuda del tutorial y el código para programarlo podrás ponerlo en marcha en unos minutos.
Lista de materiales
- 1 Kit chasis de carro con tres ruedas
- 1 Cable con switch
- 1 Arduino UNO Compatible con Cable USB
- 1 Cable micro USB
- 2 Baterías de respaldo Power Bank 5V 2600mAh
- 1 Puente H
- 2 Protoboard 170 Puntos
- 4 Separadores de Nylon M3x8
- 23 Tornillos M3x6
- 7 Separadores de Latón M3x8 mm
- 3 Tornillos M3x10 mm
- 3 Tuercas M3
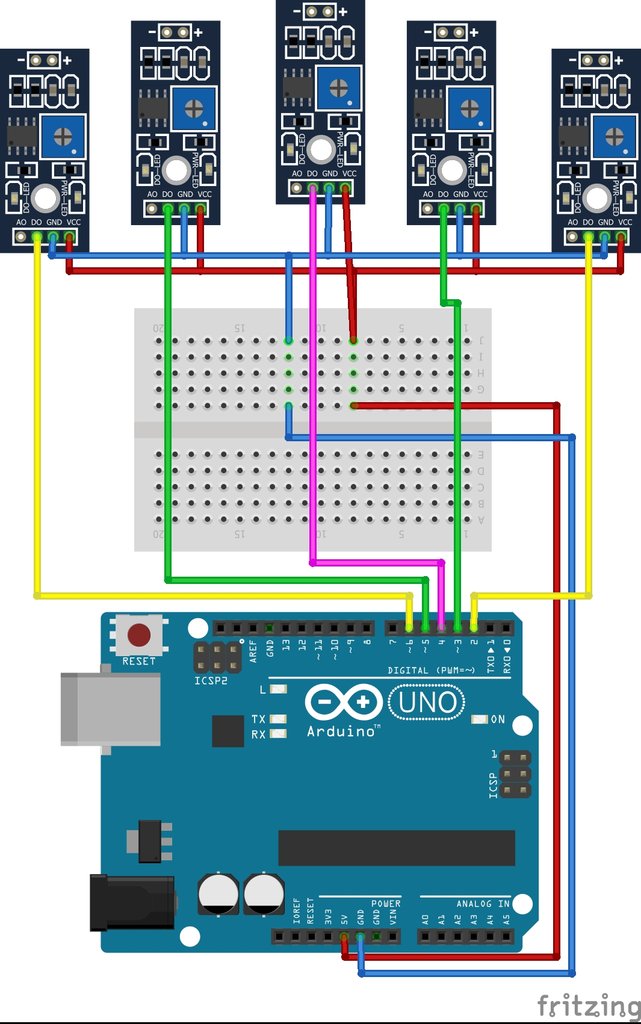
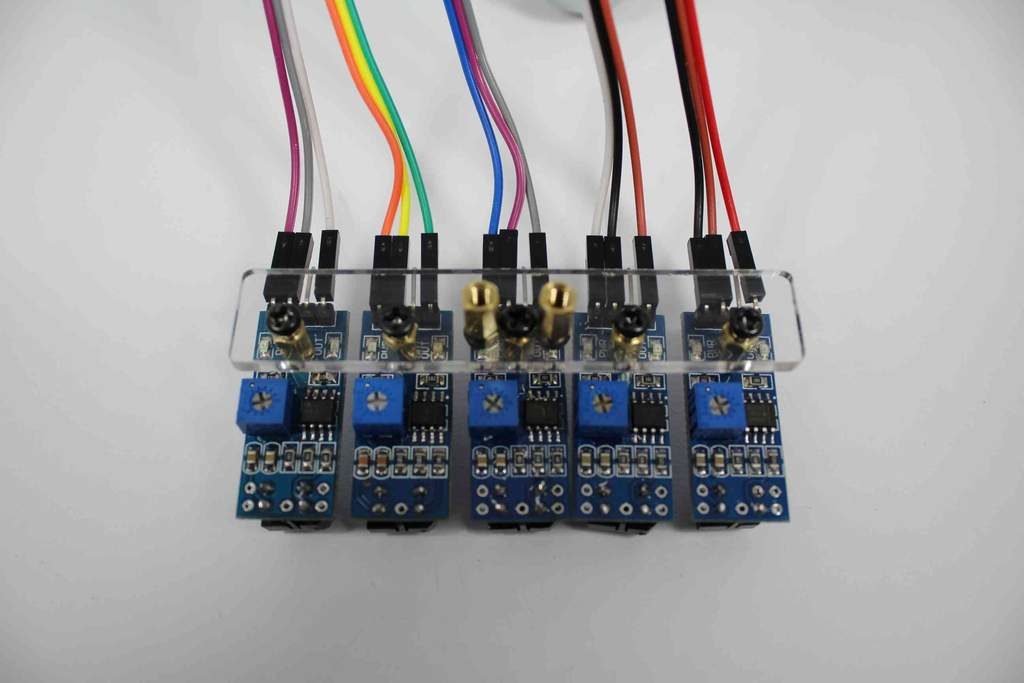
- 5 Módulos sensor óptico reflectivo TCRT5000
- 8 Cables dupont macho a macho de 10cm
- 9 Cables dupont macho a macho 20cm
- 7 Cables dupont macho a macho de 10cm
- 16 Cables Dupont Macho Hembra de 20 cm
- 2 Sujetadores de acrílico transparente de 3 mm
- 1 Cautín
Desarrollo
Retira la protección de las piezas de acrílico.

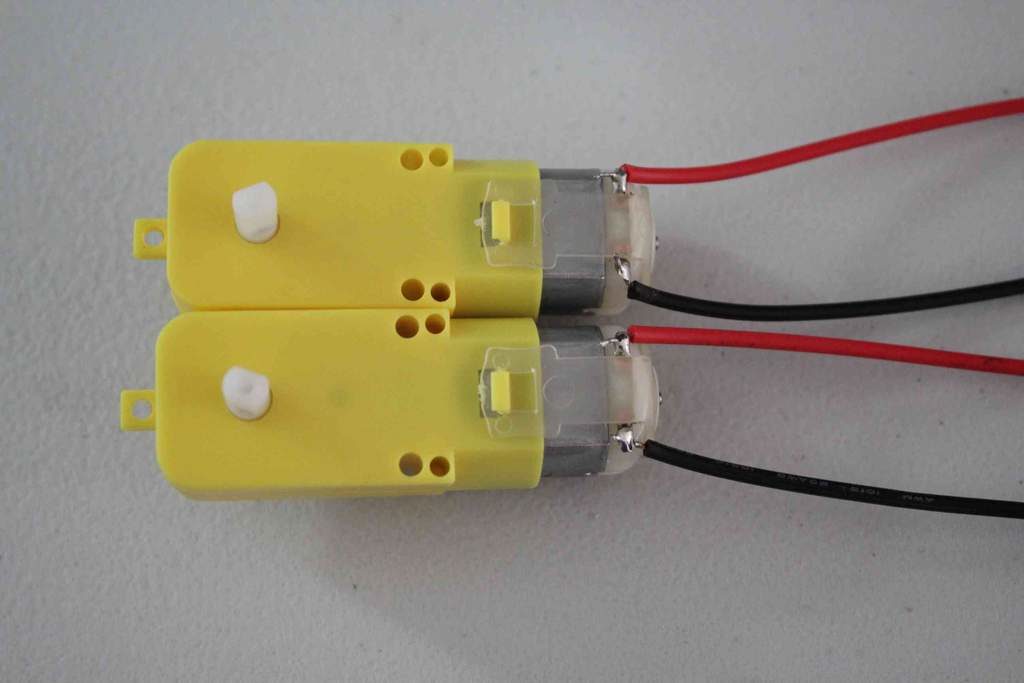
Solda los cables a los polos de los motores. Es importante soldar de la misma manera que se muestra en la imagen, de lo contrario los motores podrían girar hacia el sentido opuesto.
Coloca los soportes de acrílico al chasis.

Coloca motores y tornillos en los soportes.
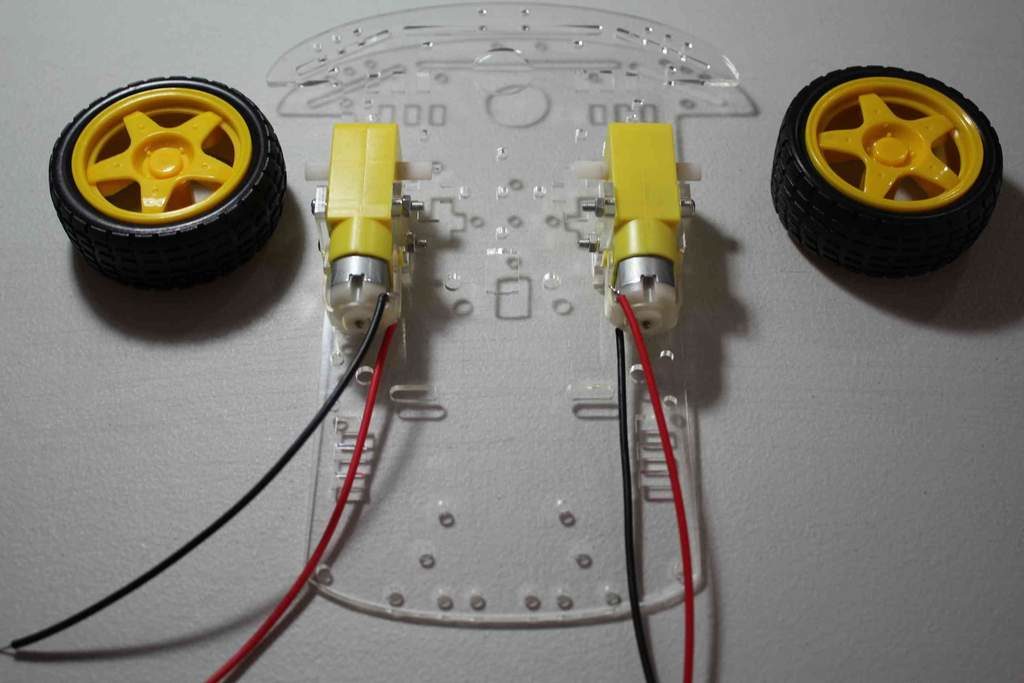
Coloca las ruedas y los encoders en los motores.

Coloca los separadores de 25mm a la rueda loca.


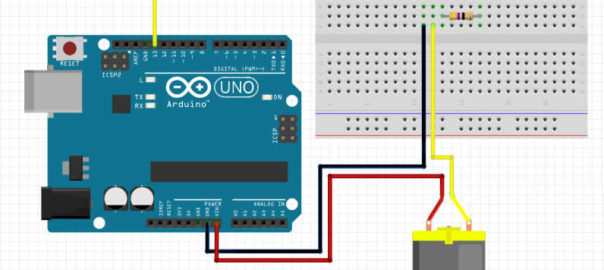
Monta el Arduino UNO al chasis.


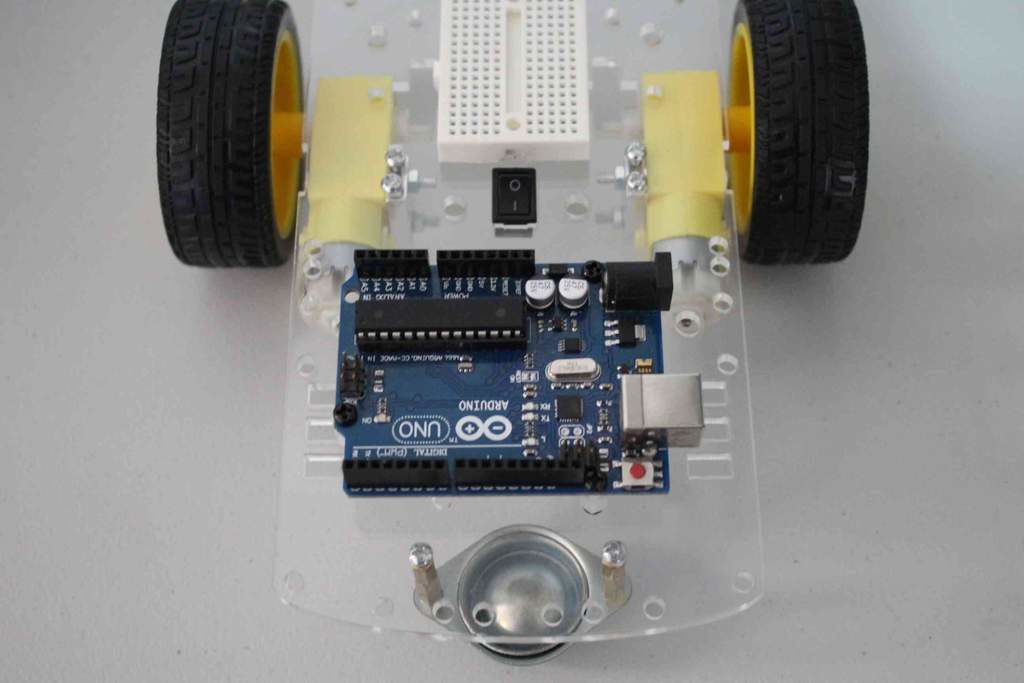
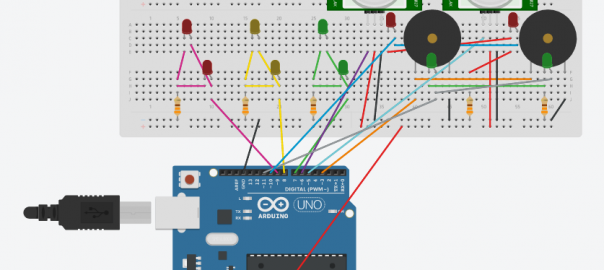
Coloca el protoboard
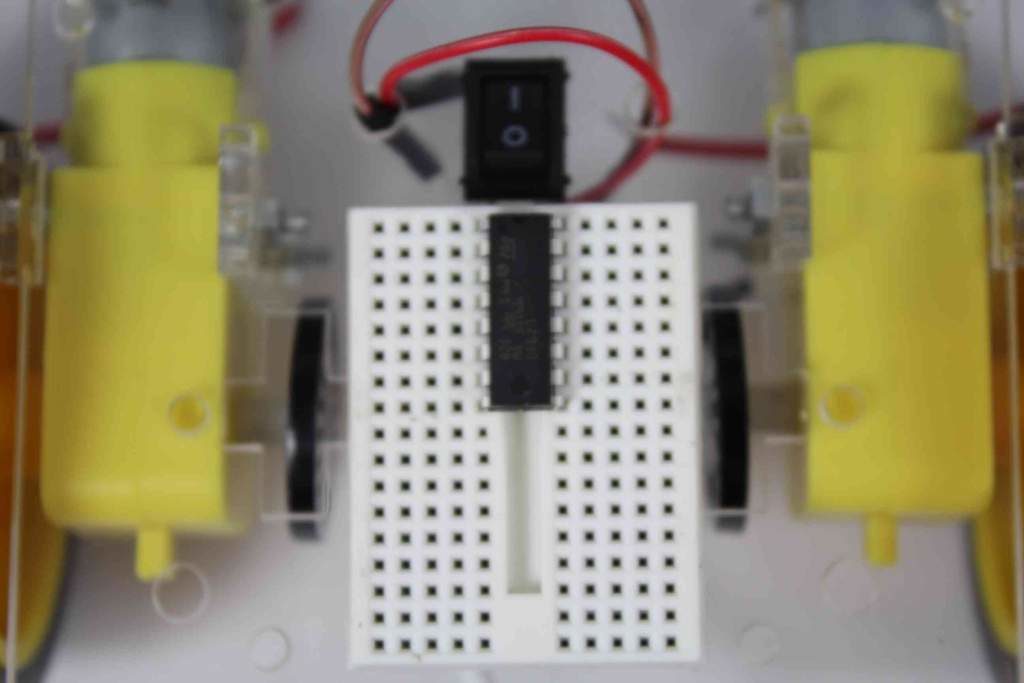
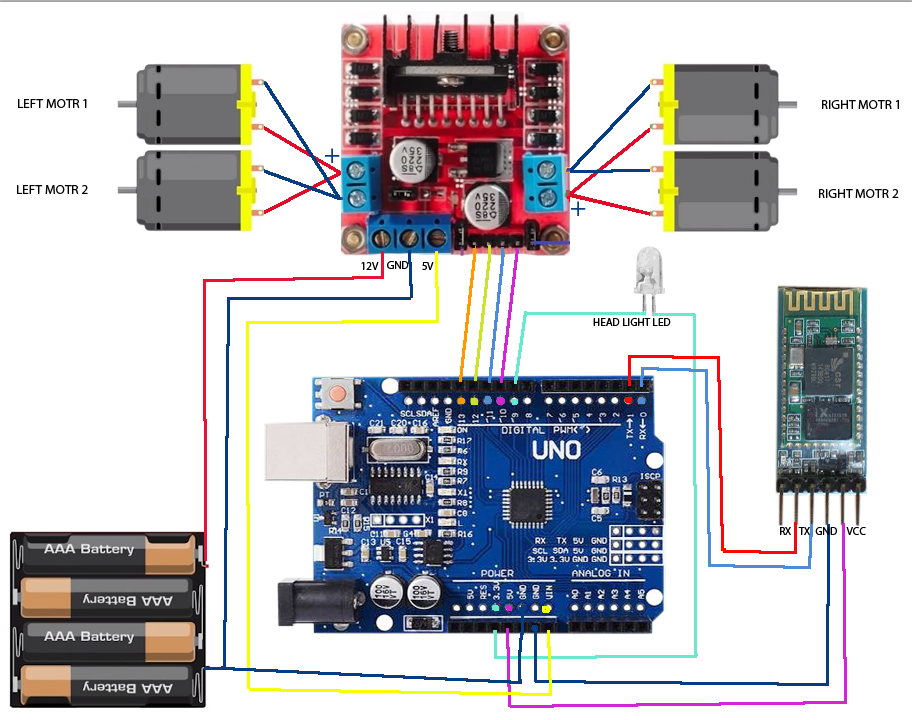
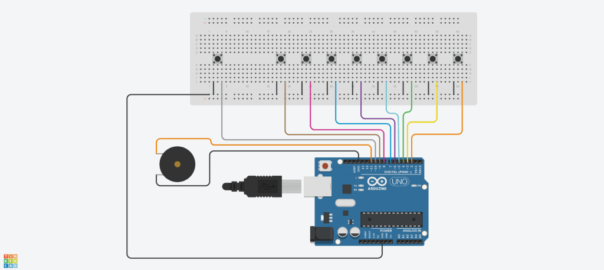
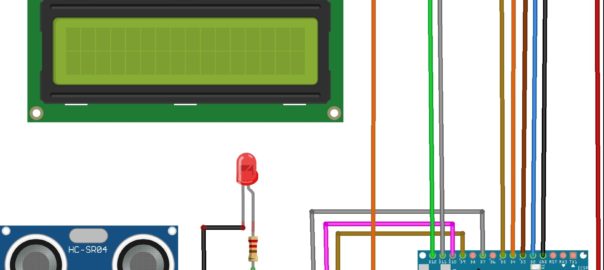
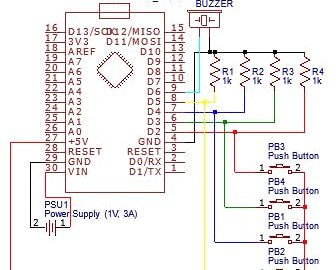
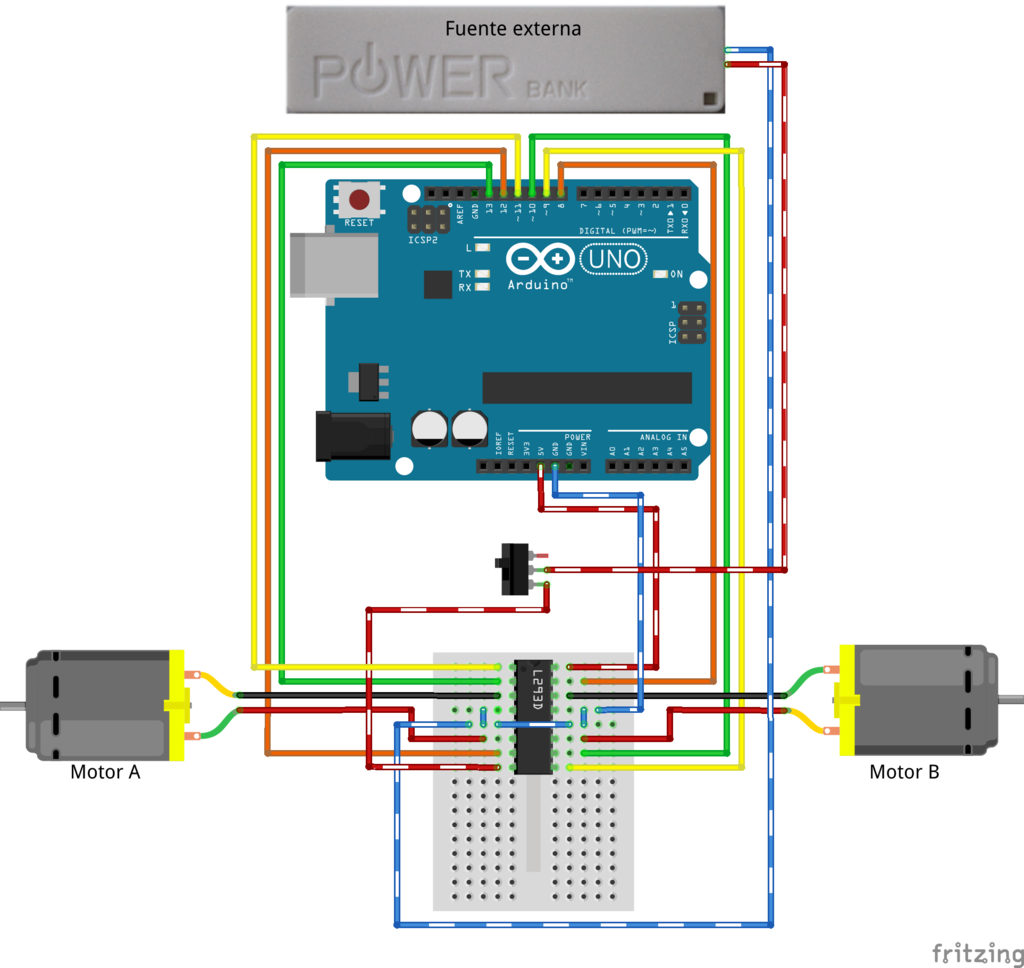
Conecta el puente H tal como se muestra en el diagrama
- Antes de seguir con el ensamble verifica que los motores se muevan correctamente con este programa, descargalo en el siguiente enlace y cárgalo.
- El robot se debe de mover Adelante por 1 segundo, después a la izquierda durante 1 segundo, después atrás durante 1 segundo, después a la derecha durante 1 segundo y espera 1 segundo para volver a realizar los movimiento una vez mas:
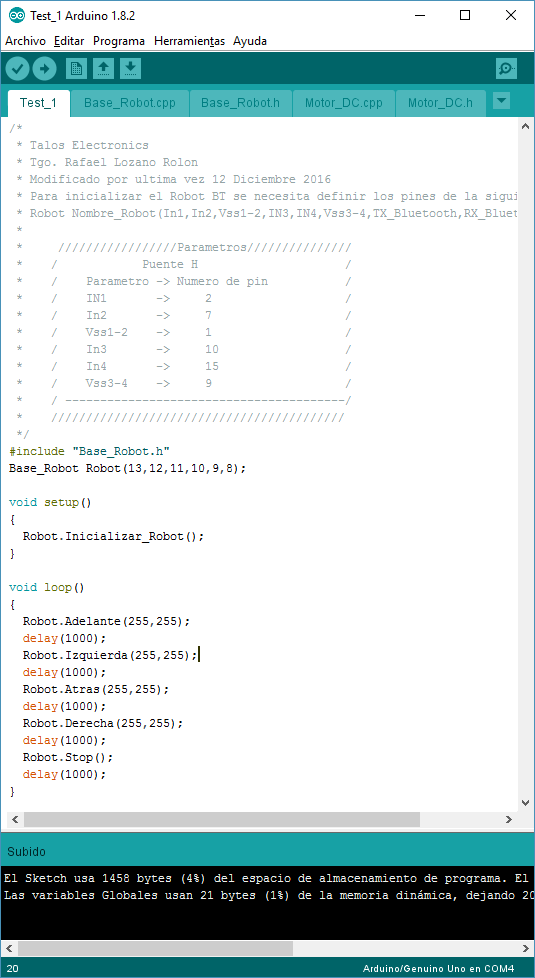
Este programa es solo una prueba para comprobar que la etapa de los motores esta armada correctamente. Si los motores no se mueven en esa secuencia verifica que tus conexiones esten bien hechas
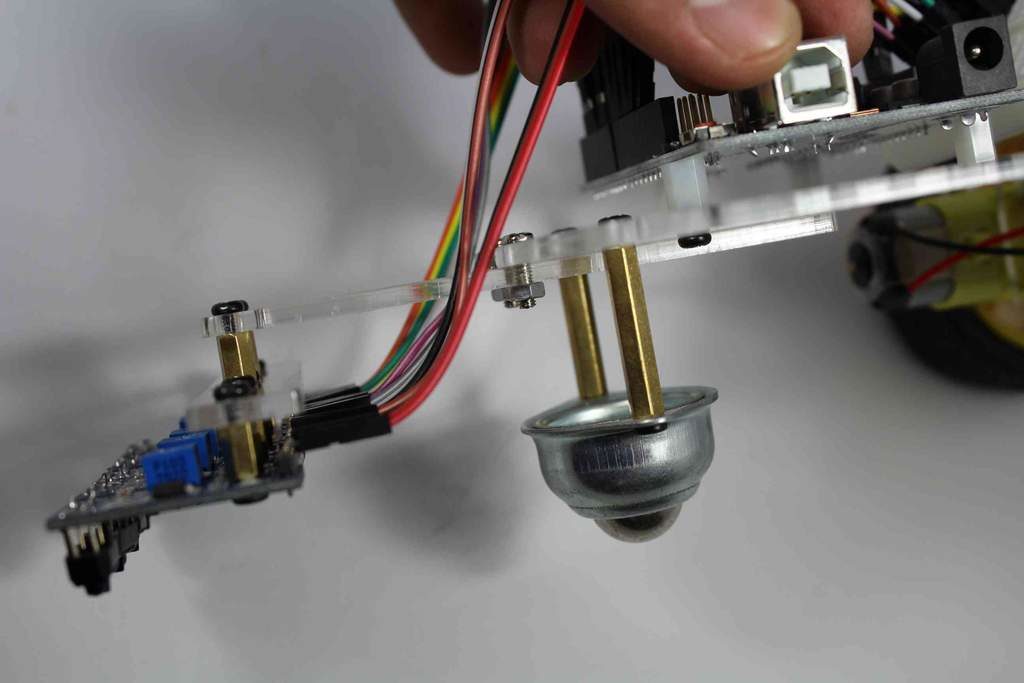
- Coloca los separadores de metal de 8mm a los sensores
- Coloca los separadores de 8 mm a la pieza de acrílico
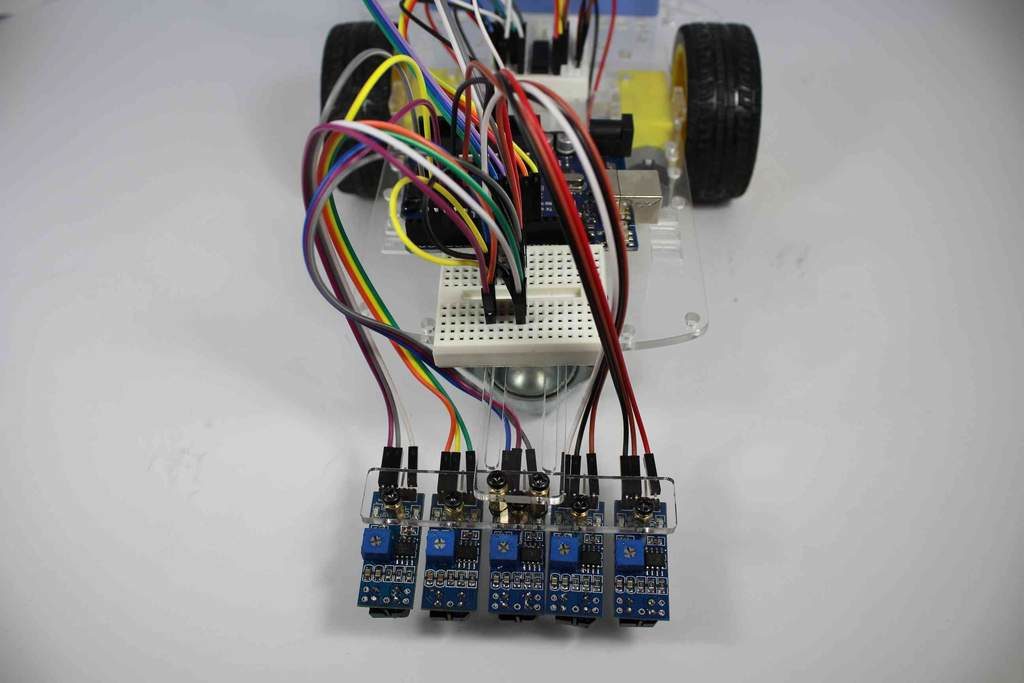
- Atornilla los sensores a la pieza de acrílico.
- Conecta los Cables dupont macho hembra de 20cm
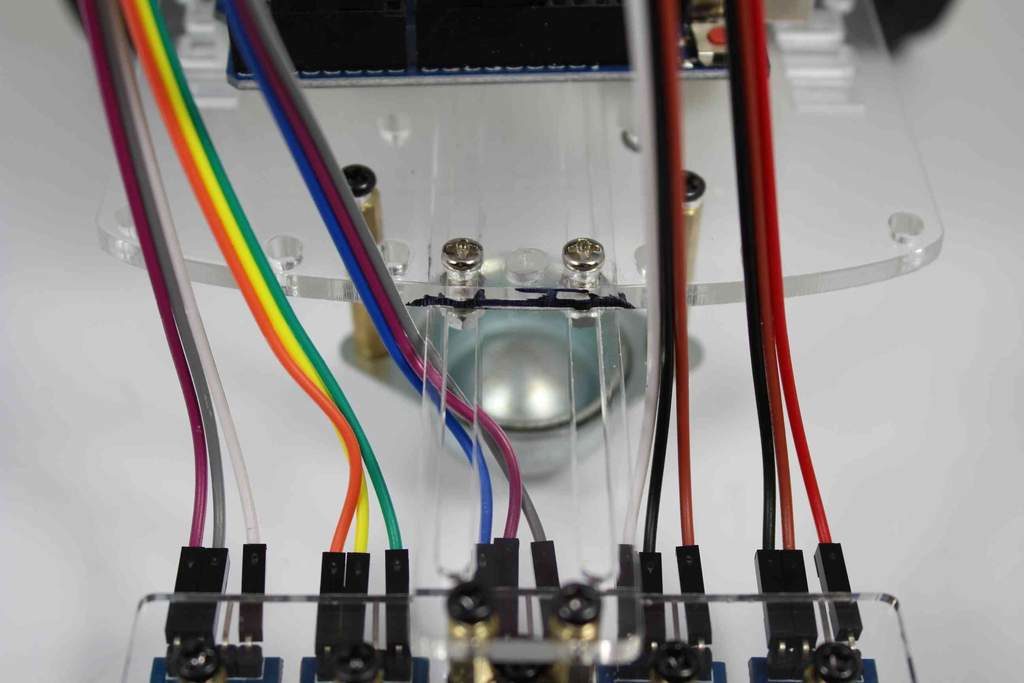
- Atornilla la segunda pieza de acrílico como se muestra en la imagen.
- Atornilla la pieza al chasis de tres ruedas utiliza un par de tornillos M310 y tuercas.

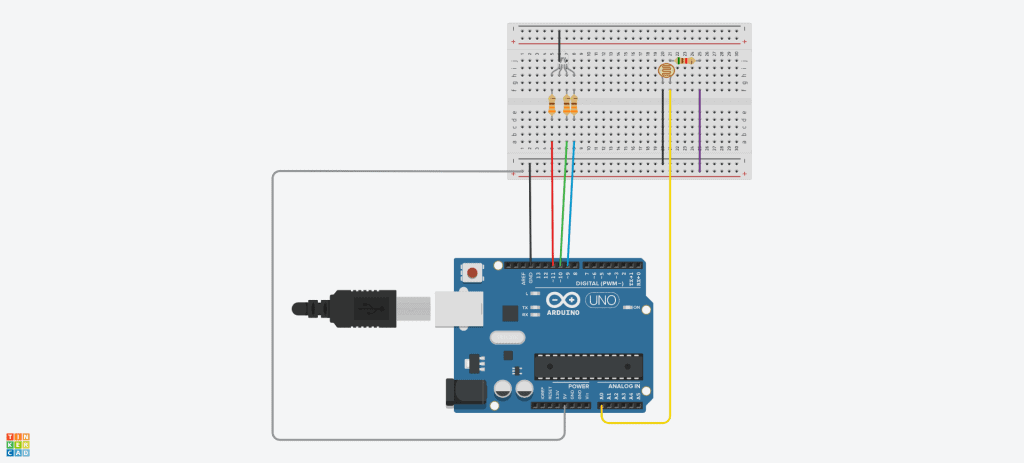
Coloca el segundo protoboard para hacer las conexiones de los sensores.
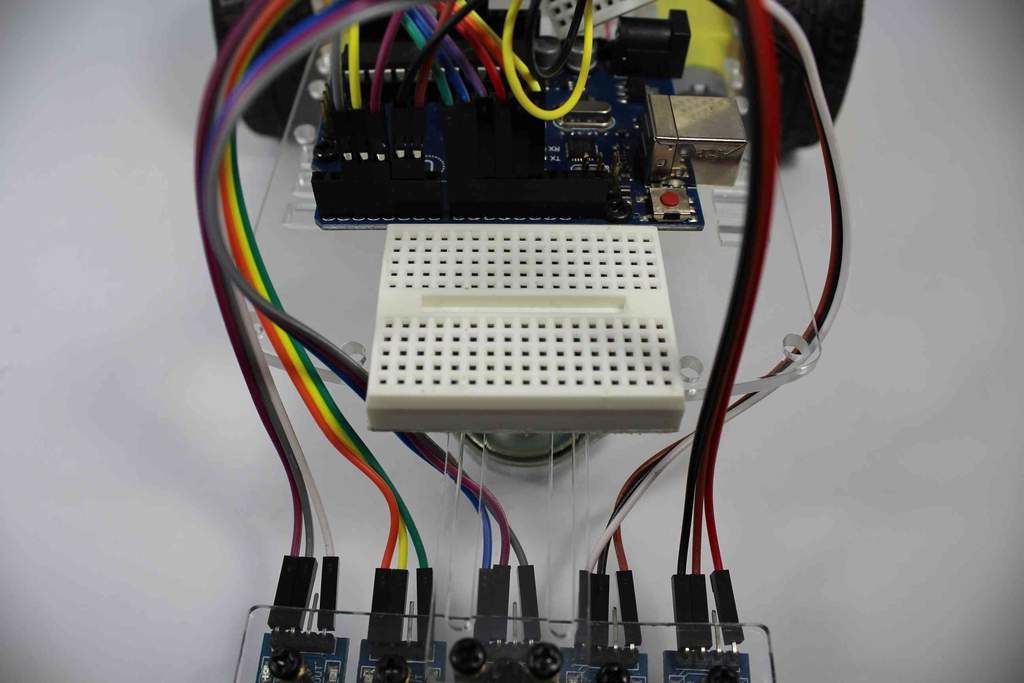
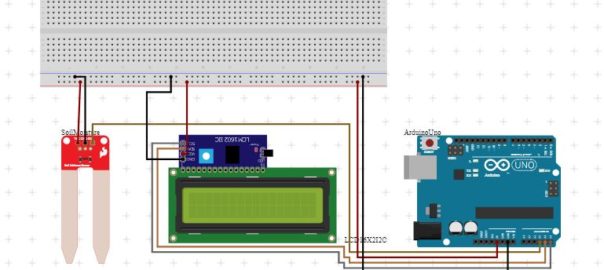
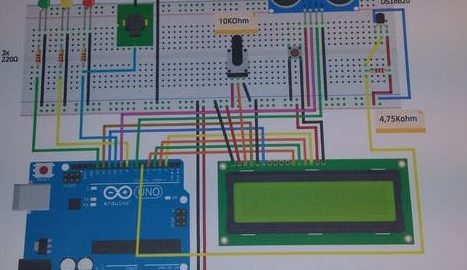
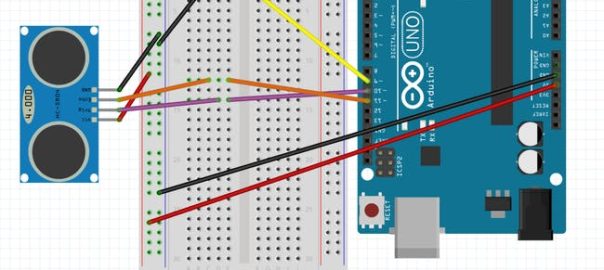
Realiza las conexiones según el diagrama

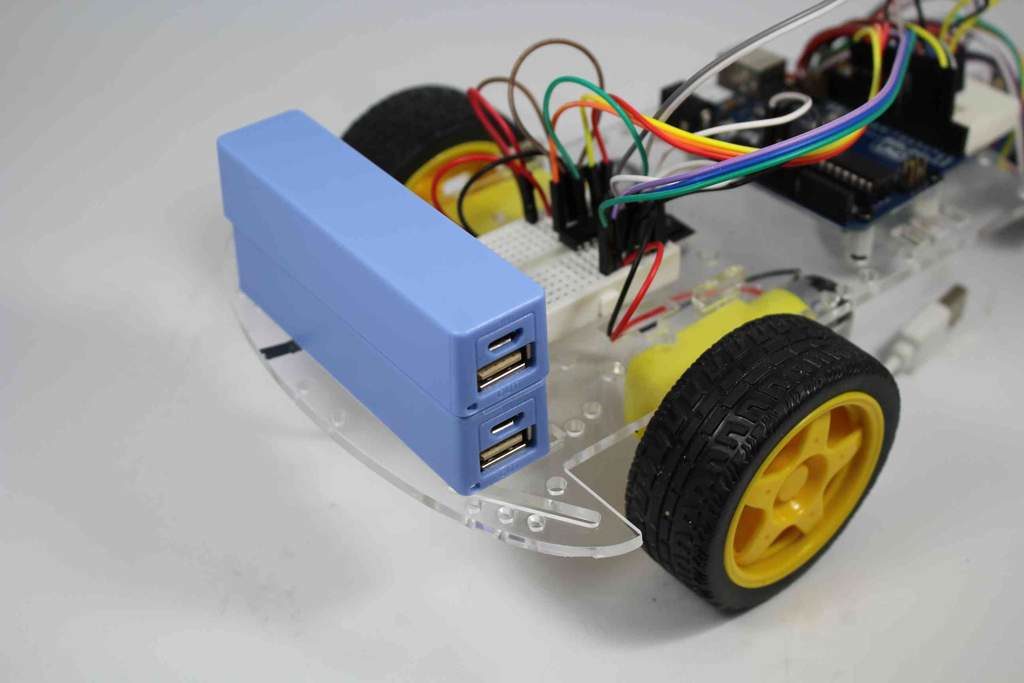
Pega las baterías al chasis de tres ruedas
Carga el programa al arduino.
Código
-
 Arduino ATmega 2560 R3¡Oferta!
Arduino ATmega 2560 R3¡Oferta!$20.50$19.00 -
 Arduino Uno Wifi¡Oferta!
Arduino Uno Wifi¡Oferta!$15.00$13.00 -
 Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!
Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!$10.00$9.50