Cómo armar carrito con control remoto: En este tutorial se mostrará la forma en cómo funciona, se arma y programa un carrito robot controlado por comando remotos. Este robot puede llegar a tener muchas más aplicaciones y cumplir retos diversos. El control remoto ofrece una cantidad amplia de opciones programadas para que el robot realice diferentes acciones.
Para poder armar y conectar el robot se necesitan los siguientes materiales:
- 1 Arduino UNO
- 1 Driver L298N.
- 2 Motores DC.
- 4 LEDs (de preferencia de diferentes colores).
- 1 porta baterías.
- 1 bateria de 9 voltios.
- 1 1838B (receptor de señales y control remoto).
- 4 resistencias de 330 Ohms.
- 15 Jumpers (Suficientemente largos para la distribución del circuito).
- 1 Carcasa de carrito.
Diagrama y funcionamiento del puente H
Un Puente en H es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Son ampliamente usados en robótica y como convertidores de potencia. Los puentes H están disponibles como circuitos integrados, pero también pueden construirse a partir de componentes discretos.
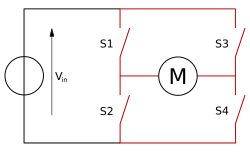
Los 2 estados básicos del circuito, girando en un sentido y el otro.
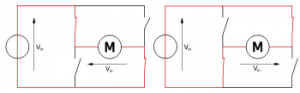
El término “puente H” proviene de la típica representación gráfica del circuito. Un puente H se construye con 4 interruptores (mecánicos o mediante transistores). Cuando los interruptores S1 y S4 están cerrados y S2 y S3 abiertos se aplica una tensión positiva en el motor, haciéndolo girar en un sentido. Abriendo los interruptores S1 y S4 y cerrando S2 y S3, el voltaje se invierte, permitiendo el giro en sentido inverso del motor.
Funcionamiento del 1838B
El OS – 1838B es un componente miniaturizado usado para recibir los rayos infrarrojos a distancia remota. El diodo PIN y preamplificador separado IC se montan sobre un único cuadro de conductores. El paquete de epoxi contiene un filtro IR especial. Este módulo tiene un excelente rendimiento incluso en perturbada aplicaciones de luz ambiental y proporciona protección contra impulsos de salida no controlada.
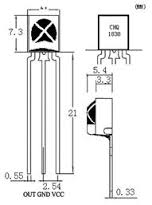
El mando a distancia contiene un circuito interno, un procesador y uno LED que emite la señal infrarroja. Este transmite el código correspondiente del botón del mando a distancia pulsado y lo transmite al 1838B en forma de una serie de impulsos de luz infrarroja. De forma análoga, los pulsos de luz infrarroja transmitidos son de dos tipos, los llamados 0 y 1. En el interior del 1838B se recibe la serie de impulsos de infrarrojos y los pasa al arduino que decodifica la serie de 0 y 1 en los bits digitales que activarán una determinada función del dispositivo. Además de los datos para activar una determinada función en el dispositivo, los mandos a distancia pueden transmitir otra información asociada.
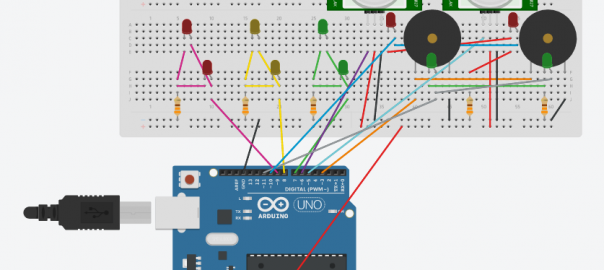
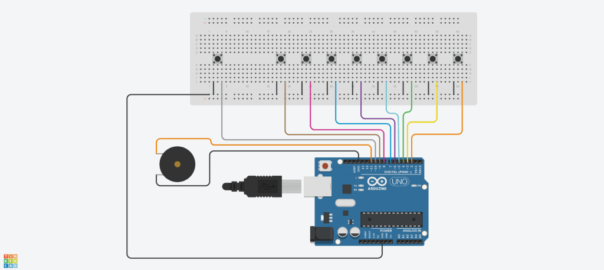
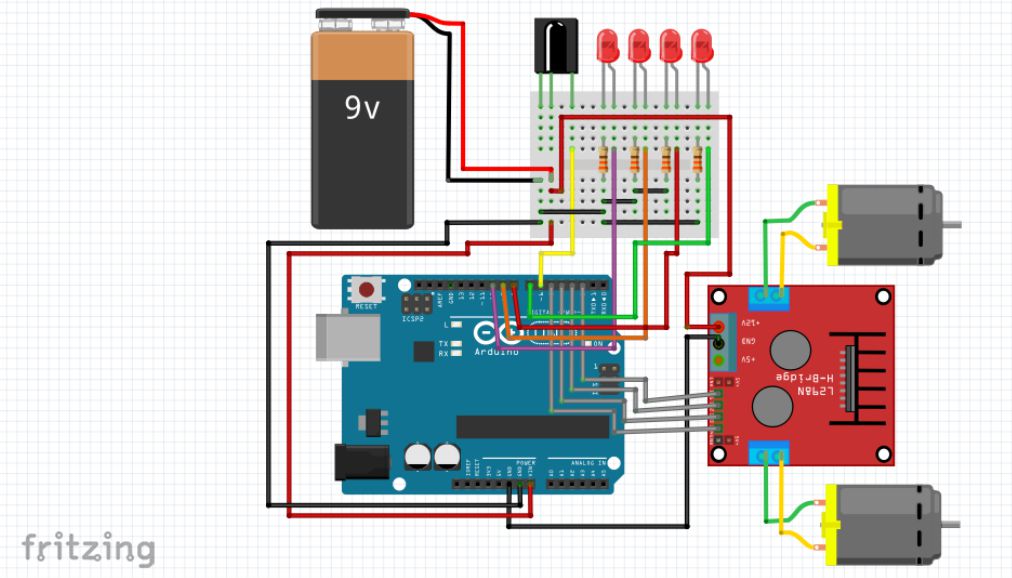
Explicación del diagrama: imagen principal
El circuito funciona de la siguiente manera, empezando con lo motores conectados al Driver L298N, donde cada cable del motor se conecta a las salidas determinadas (1,2,3,4), las entradas en el Driver se conectan con jumpers al arduino en los pines 2,3,4,5. Luego se hacen las conexiones en la protoboard, done empezamos con las alimentaciones del arduino, sean los 5 volts y la tierra, donde se conectarán los leds, siendo el cátodo a tierra por medio de una resistencia de 330 Ohms (se puede puentear la tierra usando una sola resistencia), y el ánodo a los pines 7,8,9 y 10, y el receptor 1838B con sus pines respectivos a tierra y voltaje, el pin transmisor conectado al pin 6 del arduino. Al final, se debe conectar en una batería desde 5 a 12 volts (en este caso una de 9 volts), conectando la alimentación al pin del arduino Vin y a su tierra, como también se le debe conectar a pin de 5 voltios o de 12 voltios al Driver L298N y a su tierra
Para programar el robot y controlarlo, se debe importar primero la librera “IRremote”. Aqui tienen el archivo comprimido que contiene la libreria.
Cómo armar carrito con control remoto Librería IRremote
Como ya se dijo cada botón tiene un código diferente que se reconoce del control, por lo cual, antes de poder descargar el código prueba principal para controlar el robot, se debe descargar el código al Arduino para imprimir en la pantalla del monitor serial el código que se genera de cada botón.
Código:
#include <IRremote.h> //Librerías que se deben exporter al código
#include <IRremoteInt.h>
int input_pin = 2; //La señal de entrada está conectada al pin 2
IRrecv irrecv(input_pin);
decode_results signals;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // enable input from IR receiver
}
void loop() {
if (irrecv.decode(&signals)) {
Serial.println(signals.value, HEX);
irrecv.resume(); // get the next signal
}
}Código para el mini-robot
Una vez terminando de reconocer los códigos de cada botón del control remoto, este es el algoritmo de prueba principal (Se debe cambiar el código en las condiciones del algoritmo por los códigos de los botones que se desee utilizar del control remoto).
#include <IRremote.h> //Librerías que se deben exporter al código
#include <IRremoteInt.h>
int input_pin = 2; //La señal de entrada está conectada al pin 2
IRrecv irrecv(input_pin);
decode_results signals;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // enable input from IR receiver
}
void loop() {
if (irrecv.decode(&signals)) {
Serial.println(signals.value, HEX);
irrecv.resume(); // get the next signal
}
}Armado final y Prueba
Una vez armado el circuito, obtenido los códigos de cada botón del control remoto para los comandos en el código y haberlo subido correctamente al arduino, ya esta listo para ser controlado el mini-robot. A continuación se muestra un vídeo de su funcionamiento. Y el tutorial cómo armar carrito con control remoto ha concluido.
-
 Arduino ATmega 2560 R3¡Oferta!
Arduino ATmega 2560 R3¡Oferta!$20.50$19.00 -
 Arduino Uno Wifi¡Oferta!
Arduino Uno Wifi¡Oferta!$15.00$13.00 -
 Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!
Arduino Mini USB Nano V3.0 CH340 Chip Board 5V 16M + Cable¡Oferta!$10.00$9.50
www.teslabem.com/